Nature Machine Intelligence ( IF 23.8 ) Pub Date : 2024-04-19 , DOI: 10.1038/s42256-024-00825-7 Johannes Kühn , Tingli Hu , Alexander Tödtheide , Edmundo Pozo Fortunić , Elisabeth Jensen , Sami Haddadin
|
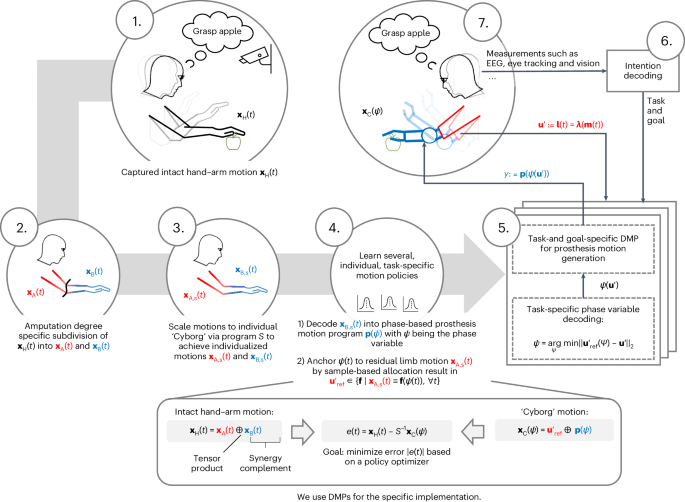
Limb-driven control allows for direct control by using residual limb movements rather than unnatural and complex muscle activation. Existing limb-driven methods simultaneously learn a variety of possible motions, ranging from a residual limb to entire arm motions, from human templates by relying on linear or nonlinear regression techniques. However, the map between a low-dimensional residual limb movement and high-dimensional total limb movement is highly underdetermined. Therefore, this complex, high-dimensional coordination problem cannot be accurately solved by treating it as a data-driven black box problem. Here we address this challenge by introducing the residual limb-driven control framework synergy complement control. Firstly, the residual limb drives a one-dimensional phase variable to simultaneously control the multiple joints of the prosthesis. Secondly, the resulting prosthesis motion naturally complements the movement of the residual limb by its synergy components. Furthermore, our framework adds information on contextual tasks and goals and allows for seamless transitions between these. Experimental validation was conducted using subjects with preserved arms employing an exo-prosthesis setup, and studies involving participants with and without limb differences in a virtual reality setup. The findings affirm that the restoration of lost coordinated synergy capabilities is reliably achieved through the utilization of synergy complement control with the prosthesis.
中文翻译:
无缝肢体驱动假肢的协同补体控制方法
肢体驱动控制允许通过使用残肢运动而不是不自然和复杂的肌肉激活来直接控制。现有的肢体驱动方法依靠线性或非线性回归技术,从人类模板中同时学习各种可能的运动,从残肢到整个手臂的运动。然而,低维残肢运动和高维总肢体运动之间的映射是高度不确定的。因此,这种复杂的、高维的协调问题不能通过将其视为数据驱动的黑箱问题来准确解决。在这里,我们通过引入残肢驱动控制框架协同补充控制来应对这一挑战。首先,残肢驱动一维相位变量来同时控制假肢的多个关节。其次,由此产生的假肢运动通过其协同组件自然地补充残肢的运动。此外,我们的框架添加了有关上下文任务和目标的信息,并允许它们之间的无缝转换。实验验证是使用使用外置假肢设置的保留手臂的受试者进行的,并涉及虚拟现实设置中具有或不具有肢体差异的参与者的研究。研究结果证实,通过利用假体的协同补体控制,可以可靠地恢复失去的协调协同能力。






























 京公网安备 11010802027423号
京公网安备 11010802027423号