
Abstract
Aerial displays for providing road information require long-distance image formation and a compact installation space. This paper proposes a compact optical system for forming long-distance floating images by introducing a Fresnel lens in an aerial imaging by retro-reflection (AIRR) optical system. In the conventional AIRR optics, since the aerial image position is the plane-symmetrical position of the light source with respect to the beam splitter, the installation space for forming a long-distance aerial image becomes huge. Our proposed method uses the virtual image formed by a Fresnel lens as the light source in an AIRR optical system. This leads to a much longer distance from the beam splitter to the aerial image than the distance from the beam splitter to the light source. We developed a prototype long-distance floating aerial display system using a large-scale Fresnel lens. As a result, the distance from the LED panel to the beam splitter was halved. Furthermore, we used two beam splitters to form two aerial images by using a single LED panel. Long-distance floating images could be formed 3.4 m and 4.6 m away from the beam splitters and could be seen with the naked eye.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In our research, we consider new forms of traffic information display. Current traffic information displays are a hazard due to their risk of falling and causing accidents. The issue is how to avoid installing them overhead on the road. Furthermore, recently smart cities have been studied as the future of cities [1, 2]. As cities change, traffic information display systems are also expected to change [3]. We propose a new method of traffic information display using aerial display technology. Aerial display is a technology that uses optics to converge light from a light source to form a real image in the air. Recently, the technology has been gaining interest in the fields of digital signage, entertainment, etc. [4]. The display unit itself is installed away from the road, and only aerial images are displayed above the road. In this way, the images can be displayed in front of the driver's eyes without coming into contact with the vehicles. We consider that this is the main advantage of road displays using aerial displays. To provide road information, a large aerial image is needed. We used Aerial imaging by retro-reflection (AIRR) [5], which has the advantage that it is excellent for large scale applications. In addition, different types of applications for AIRR optics have been reported. Polarized AIRR (p-AIRR) improves the brightness of aerial images [6]. A combination of AIRR optics and two acrylic spheres has been proposed [7]. An aerial interface system combining aerial displays, user tracking systems and virtual reality (VR) spaces has been reported [8]. AIRR technology has the potential to be used as an aquatic display [9]. These developments show that the AIRR optical system has a high degree of freedom in the optical components and design. Thus, we consider that AIRR optics can be employed in our application. We have previously proposed an aerial image formation device for road infrastructure by using AIRR and developed a large-scale prototype [10]. We raised various issues in our previous paper, such as the brightness of the display and how it displays images in congested situations, etc. In particular, we considered the long-distance floating of aerial images to be a major challenge. Due to the principle of AIRR, the position where the aerial image is formed is plane-symmetrical with respect to the beam splitter. Thus, to form a long-distance floating aerial image, the distance of the light source from the beam splitter must be extended, which leads to a decrease in brightness. One of the solutions is to use a Fresnel lens. In the previous study [11], the possibility of extending the distance was confirmed. However, the size of the Fresnel lens meant that aerial images could not be observed with the naked eye.
The aim of the work described in this paper was to develop a prototype optical system by using a large-scale Fresnel lens and to confirm the feasibility in practical applications. In addition to the use of lenses in the prototype, two parallel beam splitters are used to form aerial images at different locations. We observed the aerial images formed by the prototypes with the naked eye. Therefore, we confirmed that the use of Fresnel lenses enabled the formation of longer-distance floating aerial images and more compact equipment than in the previous work [10]. In addition, we discuss some issues faced in practical applications. Preliminary results from this study were presented at LDC2023 [12]. In this paper, in particular, we study the relationship between the axial magnification of the lens and the position of aerial imaging.
2 Principles of long-distance floating with AIRR by use of Fresnel lens
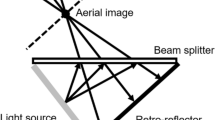
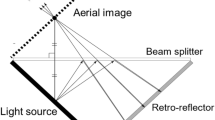
Figure 1 shows the principle of the conventional AIRR. AIRR consists of three elements: a light source, a retro-reflector, and a beam splitter. The light emitted from the light source is light reflected by the beam splitter. This reflected light is reflected in a direction along the incident direction by the retro-reflector. The retro-reflected light converges to a position that is plane-symmetrical with the light source with respect to the beam splitter.

Principle of aerial imaging by retro-reflection (AIRR)
In this work, we utilized virtual image formation with a Fresnel lens. As shown in Fig. 2, the light source is placed at a position within the focal length of the Fresnel lens. The light emitted from the light source is refracted by the Fresnel lens to form an enlarged virtual image. The object position and the image position satisfy the lens maker's equation:
where a is the distance from the light source to the Fresnel lens, b is the distance from the virtual image to the Fresnel lens, and f is the focal length of the Fresnel lens. Next, we explain the lens magnification [13]. Lateral magnification β, which is the ratio of image length to object length measured in planes that are perpendicular to the optical axis, is obtained by the following equation:

Virtual image formation with a Fresnel lens
Axial magnification α is the magnification in the optical axis direction of the optical system. Specifically, the axial magnification is the ratio of the movement of the image to that of the object along the optical axis. The following equation holds for lateral magnification and axial magnification:
where Δx is the minute movement of the object along the optical axis, and Δx′ is the minute movement of the image.
We propose an optical system that uses the virtual image of a light source as the source for aerial display, as shown in Fig. 3. Light rays from the virtual image are reflected by the beam splitter. The light reflected by the beam splitter is reflected in a direction along the incident direction by the retro-reflector. The light transmitted through the beam splitter converges to form an enlarged aerial image of the light source. As a result, the distance from the beam splitter to the aerial image is longer than the distance from the beam splitter to the light source. The use of a Fresnel lens also has the effect of making the AIRR optics thinner [14]. Next, we explain the vanishing distance. The vanishing distance is the distance at which a driver cannot see the sign in the course of driving, as shown Fig. 4 [10]. It is considered as an evaluation factor for road signs. The following equation can be obtained depending on the viewing angle of the aerial image:
where S is the vertical height of the aerial image, and θ is half the viewing angle of the aerial image.

Our proposed optical system that forms an aerial image that is magnified by a Fresnel lens

Vanishing distance for aerial image with AIRR
3 Experiments using a large-scale Fresnel lens
We developed a prototype aerial display for providing road information. Figure 5 shows the configuration of our prototype system. For the light source, we used an LED panel that displays “stop” in kanji, as shown Fig. 9a. The character size was 120 mm × 120 mm. The luminance was about 2700 cd/m2. The LEDs have an average half value angle of 120° for both sides. The beam splitters were made of 1800 mm × 900 mm tempered glass plates. Figure 6 shows a photograph of the Fresnel lens used. The specifications of the Fresnel lens are shown in Table 1 [15]. The distance a from the light source to the Fresnel lens was 800 mm. The distance b from the virtual image to the Fresnel lens was 2400 mm. The distance d1 from the Fresnel lens to the beam splitter 1 was 1.0 m. The distance d2 from the Fresnel lens to the beam splitter 2 was 1.2 m. The retro-reflector was made of a transparent polymer formed into hexagonal shapes, as shown Fig. 7. This is a prototype reflector created to reduce wave diffraction. Wave diffraction is due to the size of the corner-cubes in the retro-reflector. This sample product has a larger corner-cube in the retro-reflector than conventional products. A number of these retro-reflectors were connected to form a size of about 700 mm × 800 mm. In this experiment, two aerial images were formed by a single light source. The optical system was configured using optical see-through AIRR [16] by means of two beam splitters. The positions of the aerial images AI1 and AI2 were b + d1 (3.4 m) from beam splitter 1 and b + d1 + d2 (4.6 m) from beam splitter 2, respectively. In the conventional method, the distance from the light source to the beam splitter must be b + d1. On the other hand, the distance is a + d1 in the proposed method. We have \((a+{d}_{1})/\left(b+{d}_{1}\right)=1.8/3.4=0.53\). Thus, the distance from the light source to the beam splitter was reduced by about 53%.

Configuration of our prototype using multiple aerial LED signs. LS light source, VI virtual image, FL Fresnel lens, BS beam splitter, RR retro-reflector, AI aerial image

Photograph of the large Fresnel lens used in the experiment

The photograph shows a retro-reflector sample used in the experiment. The left figure shows a single reflector. The right figure shows the actual use of the system
The formed aerial images were visible with the naked eye. Figure 8 shows images viewed from the front. The image formation position was confirmed to be in agreement with the theoretical position.

Aerial image formed by the prototype. The left figure shows AI1 and the right figure shows AI2
Next, we checked the size of the aerial image. A screen was placed at the image formation position, and we measured the size of the aerial image on the screen. The size of the aerial image was about 360 mm × 360 mm, as shown Fig. 9b. This is 3-times as large as the light source. The lateral magnification β was 3. Thus, we confirmed that the theory is correct. Next, we measured the aerial image luminance. As the luminance meter, we used a Prometric Y-29. The Prometric Y-29 is called an imaging luminance meter and can measure the luminance of 2D images. As a result of the measurements, the average luminance values of the aerial images were 13 cd/m2 for AI1 and 20 cd/m2 for AI2, in Fig. 10.

a Light source LED panel without Fresnel lens. b Screen observation of the aerial image

Imaging luminance results. The left figure shows AI1 and the right figure shows AI2
Next, we discuss the viewing angle of the aerial image. We first measured the vanishing distance for this experiment. We checked at which position the entire aerial image was visible. As a result, the vanishing distance was about 7.0 m. Equation (4) gives the viewing angle of the aerial image. The viewing angle was about 3 degrees (θ = 1.47°).
Next, we compared the aerial images when AI1 was 3.4 m and 4.6 m to examine the trend when the floating distance was increased. We set d1 = 2.2 m when AI1 was 4.6 m. Figure 11 shows the aerial image in the experiment. The two aerial images were compared with the naked eye. As a result, the 4.6 m image seemed a little blurred. We used an imaging luminance meter to measure the luminance. As a result, the average values for the aerial images were 24 cd/m2 for 3.4 m and 22 cd/m2 for 4.6 m, in Fig. 12.

The results of aerial image at different floating distances. The left figure shows a floating distance of 3.4 m, and the right figure shows a floating distance of 4.6 m

Imaging luminance results. The left figure shows a floating distance of 3.4 m, and the right figure shows a floating distance of 4.6 m
4 Experiments to check the relationship between lens magnification and image formation position
We studied the relationship between the axial magnification of the lens and the position of aerial imaging. The theoretical values obtained from Eq. (3) were compared with the actual image formation position. When the light source is at a + Δx, the position of the aerial image is b + Δx’ + d1 from the beam splitter, and we confirmed by experiment that this relationship was indeed established. The experimental setup used to measure the position of aerial imaging is shown in Fig. 13. LED lights were used as the light source. Other components and positions were the same as those for the experimental conditions described in Sect. 3. The light source was moved by 5 mm, and the position of the aerial image was measured three times. The results of the experiment are shown in Fig. 14. The results showed that the image was formed in the theoretically predicted position. In conventional AIRR optical systems, the aerial image moves to a position equal to the distance moved by the light source. In the proposed method, the aerial image moves more than the distance moved by the light source due to the lens effect. We consider this to be the major advantage of this method.

Experimental setup to measure the relationship between axial magnification of the lens and the position of aerial imaging

Measurements of the position of aerial imaging. Blue lines are theoretical values, red dots are measured results. Δx is the minute movement of the light source along the optical axis
5 Discussion
Now we discuss the findings revealed by the experiments. It is necessary to improve the brightness and sharpness. We first discuss brightness. The target luminance value for red images to be visible outdoors is over 1600 cd/m. The brightness of our display was not sufficient for outdoor use. In principle, the brightness of the aerial image of AIRR is about 25% of the brightness of the light source. Therefore, the light source itself must be made brighter to meet the target. However, brighter light sources alone will not achieve the target. One of the causes could be that not all the light from the light source is being used. Due to the wide light distribution angle of the LED display used as the light source in this study, some light does not pass through the Fresnel lens. We will consider finding a light source with the best conditions to eliminate such wasted light. Next, we discuss sharpness. Sharpness was improved by the retro-reflector with reduced wave diffraction. However, the aerial image still became more blurred as the image formation distance increased. We think that the Fresnel lens is one of the causes. We consider the following three factors to be responsible for blurring: the first is scattering in the grooves of the Fresnel lens; the second is lens aberrations; and the third is wave diffraction. If these factors can be improved, we believe that the sharpness of aerial images can be improved. We would like to consider the optimum Fresnel lens conditions to improve image quality in future.
Next, we consider the viewing angle of the aerial images. The viewing angle in this experiment was about 3°. This angle could be due to the size of the retro-reflector used, because the reflector was smaller than the lens in this experiment. If the beam splitter and reflector are large enough, the estimated viewing angle in this experimental setup is 24.5°. However, it is expected to narrow further depending on the image formation position. For use on roads, we consider that the target image formation position is 10 m or more. Therefore, the distance a needs to be even larger than in the present conditions. The angle of the light ray narrows as the light source approaches the focal point. We consider that the issue is to determine the right components for the road conditions, including the brightness mentioned earlier.
Next, we consider the sense of floating. We asked some people to confirm how they saw the aerial image. As a result, more than half said they did not see floating. We consider that in order to investigate what the causes are, we first need to find out what people are focusing on. To this end, we would like to introduce eye tracking [17] in future work.
Next, we discuss the position of the aerial image formation, which is based on the distance required for a vehicle to stop. For example, the distance for a vehicle travelling at 40 km/h to brake to a stop is about 20 m. Due to the vanishing distance and other factors, drivers are likely to notice the display further than 10 m from the image formation position. If the image formation position is at least 10 m, it is possible to stop without hitting a wall or other object within a stopping distance of 20 m. Thus, for practical use as a road display, we need to change the image formation position depending on conditions such as vehicle speed and the location of the system. In the experiment, the image formation position was 4.6 m, and the vanishing distance was 7.0 m. Since the distance required for a vehicle traveling at 20 km/h to stop is about 10 m, we believe that our system can be used as a display for 20 km/h vehicles. We would like to conduct further experiments at longer distances in the future. Furthermore, if image formation at a distance of 10 m or more can be achieved, there is a possibility that an aerial image can be formed inside a car. Aerial images can be formed inside the vehicle through the front or rear window, as shown in Fig. 15. The drivers of vehicles behind can see the same display. We would like to investigate this as one possible display method during congestion.

Diagram of aerial image formed in a vehicle
6 Conclusion
We have developed a prototype system using a large-scale Fresnel lens for providing aerial road information by forming two aerial images at different distances. As a result of our experiments with the prototype, we confirmed that a magnified aerial image was formed at an extended floating distance by using a Fresnel lens. We also realized space saving by enlarging the size of the small light source.
Data availability
The datasets generated and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Winkowska, J., Szpilko, D., Pejić, S.: Smart city concept in the light of the literature review. Eng. Manag. Prod. Serv. 11(2), 70–86 (2019)
Toh, C.K., Sanguesa, J.A., Cano, J.C., Martinez, F.J.: Advances in smart roads for future smart cities. Proc. R. Soc. A Math. Phys. Eng. Sci. 476(2233), 20190439 (2020)
Toh, C.K., Cano, J.C., Laguia, C.F., Manzoni, P., Calafate, C.T.: Wireless digital traffic signs of the future. IET Netw. 8, 74–78 (2019)
Javidi, B., Carnicer, A., Arai, J., Fujii, T., Hua, H., Liao, H., Martínez-Corral, M., Pla, F., Stern, A., Waller, L., Wang, Q., Wetzstein, G., Yamaguchi, M., Yamamoto, H.: Roadmap on 3D integral imaging: sensing, processing, and display. Opt. Express 28(22), 32266–32293 (2020)
Yamamoto, H., Tomiyama, Y., Suyama, S.: Floating aerial LED signage based on aerial imaging by retro-reflection (AIRR). Opt. Express 22, 26919–26924 (2014)
Nakajima, M., Onuki, K., Amimori, I., Yamamoto, H.: Polariation state analysis for polarized aerial imaging by retro-reflection (PAIRR). Proc. IDW 22, 429–432 (2015)
Fujii, K., Yasugi, M., Maekawa, S., Yamamoto, H.: Reduction of retro-reflector and expansion of the viewpoint of an aerial image by the use of AIRR with transparent spheres. OSA Contin. 4, 1207–1214 (2021)
Yasugi, M., Adachi, M., Inoue, K., Ninomiya, N., Suyama, S., Yamamoto, H.: Development of aerial interface by integrating omnidirectional aerial display, motion tracking, and virtual reality space construction. J. Robot. Mechatron. 34(5), 1175–1183 (2022)
Kudo, D., Yasugi, M., Ninomiya, N., Suyama, S., Yamamoto, H.: Reduction of converging distance change in an aquatic display formed with aerial imaging by retro-reflection in conjugated optical structure. Opt. Express 31, 10965–10977 (2023)
Sakane, S., Kudo, D., Mukojima, N., Yasugi, Y., Suyama, S., Yamamoto, H.: Formation of multiple aerial LED signs in multiple lanes formed with AIRR by use of two beam splitters. Opt. Rev. 30, 84–92 (2023)
Okamoto, T., Kobori, T., Kujime, R., Yamamoto, H.: Forming a magnified aerial image formed with AIRR by use of a Fresnel lens. In: Proc. OPJ2017, 1p-D3 (2017) (in Japanese)
Sakane, S., Yasugi, Y., Suyama, S., Yamamoto, H.: Long-distance floating of aerial images formed with AIRR by use of Fresnel lens. In: The 12th laser display and lighting conference 2023 (LDC2023), p. LDC11-02 (2023)
Hecht, E.: OPTICS, Sect. 5.2. Pearson Education (2017)
Chiba, K., Yasugi, M., Yamamoto, H.: Multiple aerial imaging by use of infinity mirror and oblique retro-reflector. Jpn. J. Appl. Phys. 59, SOOD08 (2020)
Fresnel lens product catalog.: https://www.ntkj.co.jp/products/fresnel-lens/. Accessed 18 Aug 2023
Fujii, K., Endo, N., Hagen, N., Yasugi, M., Suyama, S., Yamamoto, H.: Aerial video-calling system with eye-matching feature based on polarization-modulated aerial imaging by retro-reflection (p-AIRR). Opt. Rev. 29, 429–439 (2022)
Lou, X., Fu, L., Song, X., Ma, M., Hansen, P., Zhao, Y., Duan, Y.: An integrated application of motion sensing and eye movement tracking techniques in perceiving user behaviors in a large display interaction. Machines 11, 73 (2023)
Funding
A part of this research was supported by JSPS KAKENHI Grant Number 20H05702.
Author information
Authors and Affiliations
Contributions
SS contributed to this paper as 1st author. They designed and conducted the experiments, analyzed the data and wrote the original draft. SS and HY designed the experiments and edited the manuscript.
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare no conflicts of interest associated with this manuscript.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sakane, S., Suyama, S. & Yamamoto, H. Reducing thickness of long-distance aerial display system in AIRR using Fresnel lens. Opt Rev 30, 657–663 (2023). https://doi.org/10.1007/s10043-023-00845-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10043-023-00845-5